定位和导航模块
更新: 6/29/2026 字数: 0 字 时长: 0 分钟
准备
硬件
| 硬件 | 说明 | 图片 |
|---|---|---|
| 创意盒平台 |  | |
| 电源信号模块 | 购买创意盒附送 |  |
| 导航接收机模块 | 淘宝购买链接 |  |
| 杜邦线 | 淘宝购买链接,请选择公对母类型 |
软件
| 软件 | 说明 |
|---|---|
| 导航应用 | 官方前端应用,可直接通过控制台加载和使用。 |
连接
| 连接 |
|---|
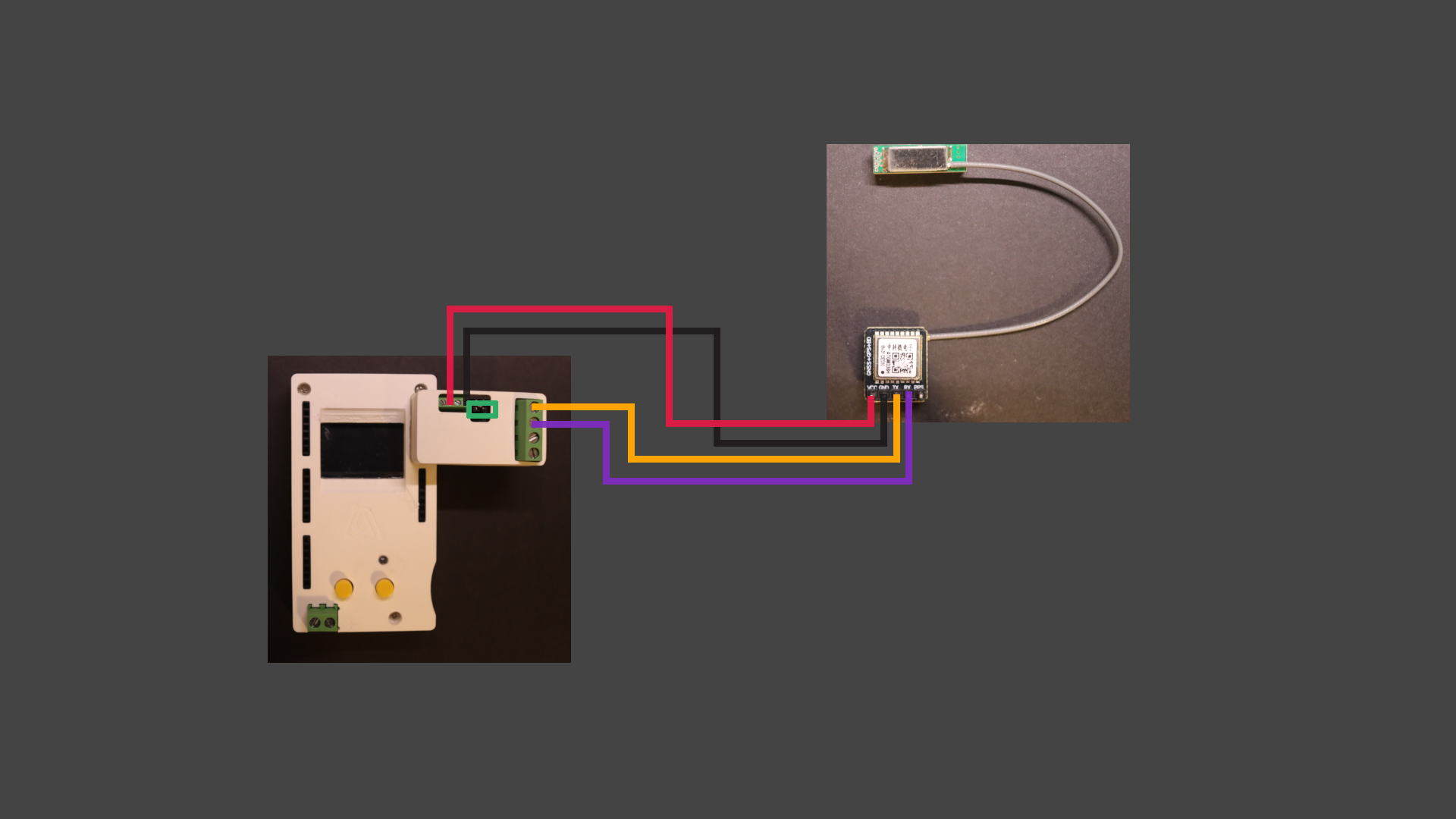
| 电源信号模块插到创意盒的任意排针,上图是平台引脚0-3 |
| ▀ 导航模块的电源VCC和电源信号模块的5V输出连接 |
| ▀ 导航模块的GND和电源信号模块的GND连接 |
| ▀ 导航模块的TX信号和电源信号模块的信号输出1连接 |
| ▀ 导航模块的RX信号和电源信号模块的信号输出2连接 |
| ▀ 电源信号模块的跳线帽调至5V输出位置 |
使用
打开创意盒控制台,并加载通信类应用中的导航模块应用。进入该应用,选择创意盒与导航模块TX信号连接的引脚编号。点击单次读取或连续读取,即可读取导航模块输出的当前位置,高度和时间等信息。
| 创意盒控制台 | 加载应用 | 选择和导航模块TX信号连接的引脚编号 | 点击按钮读取导航模块信息 |
|---|---|---|---|
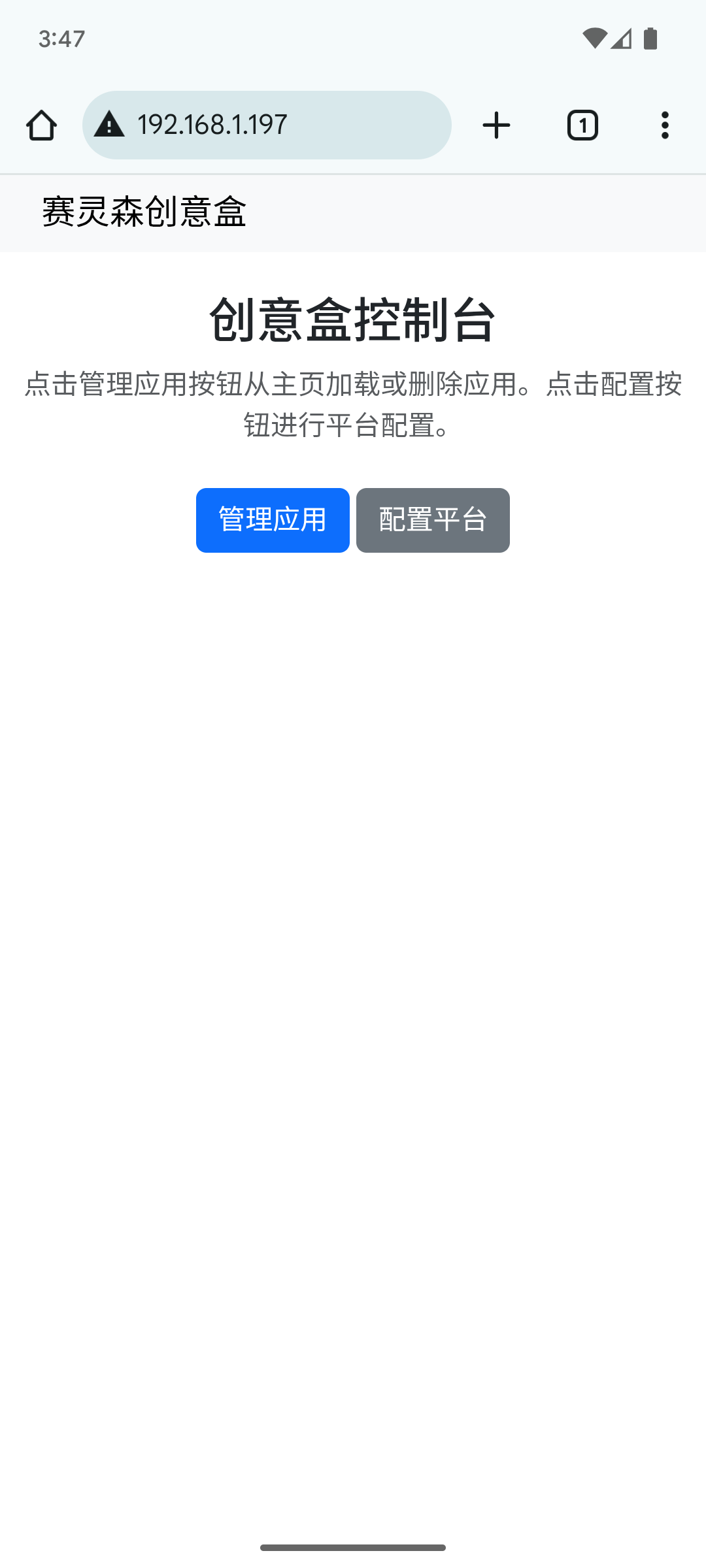 | 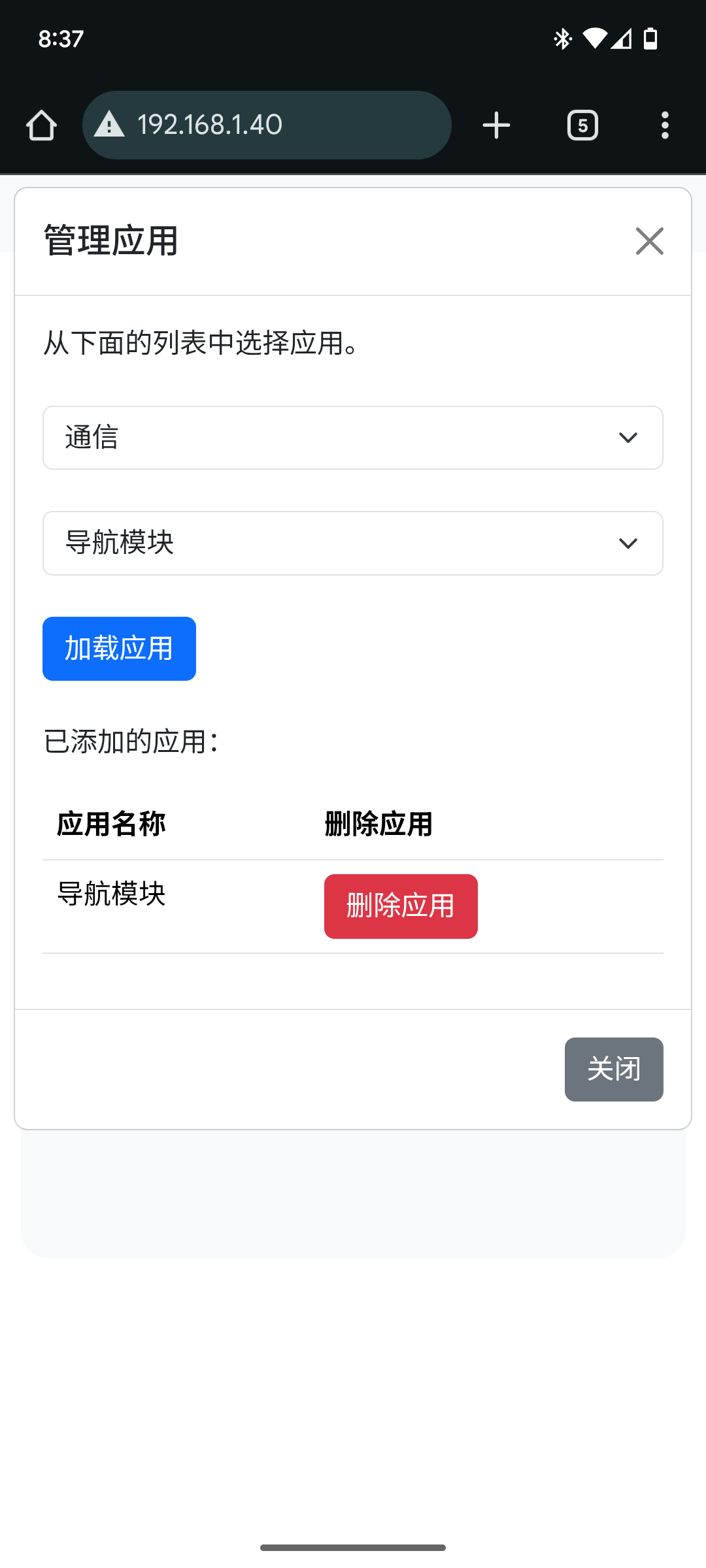 | 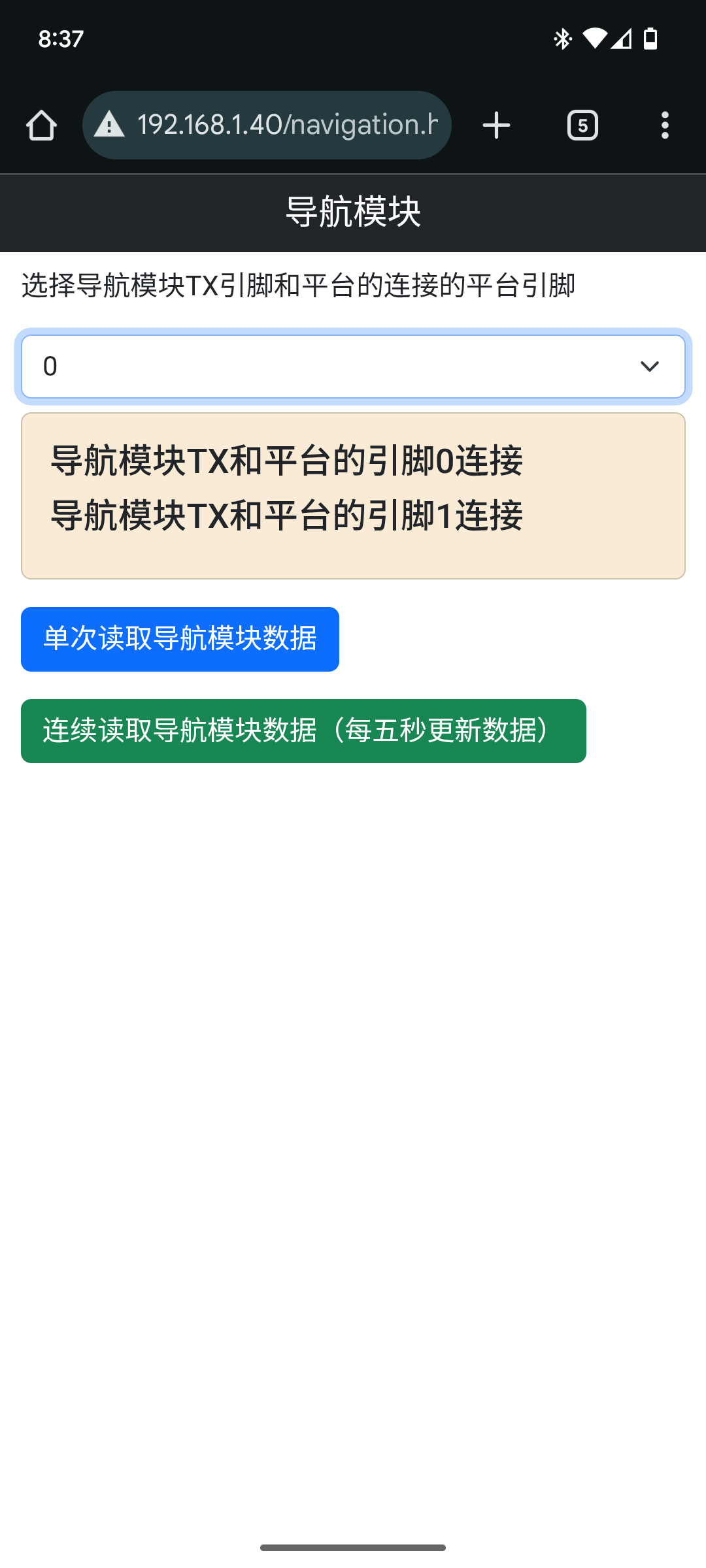 | 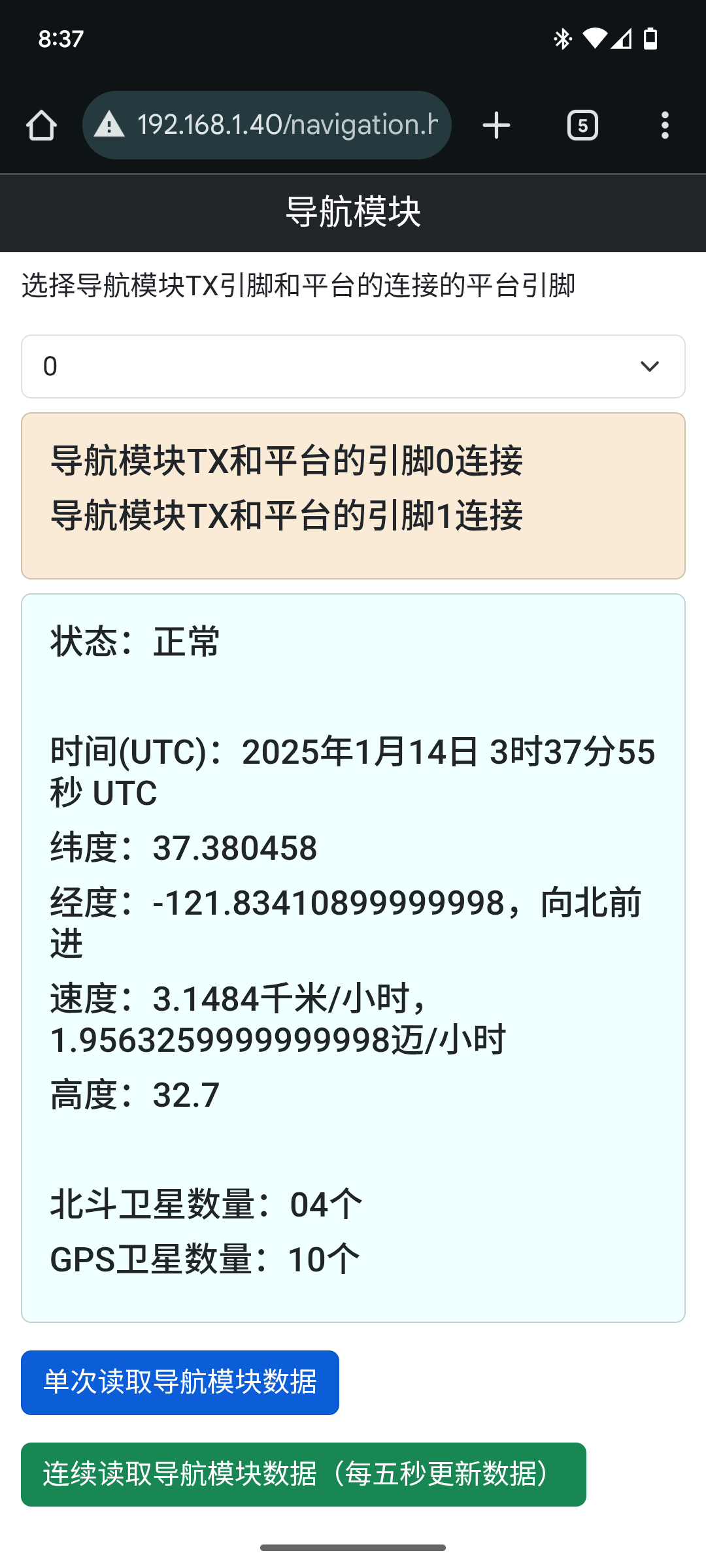 |
原理
导航系统为用户提供实时的位置信息,广泛用于各种应用领域:
- 民用:手机导航、共享单车、渔业、防灾救灾。
- 行业应用:自动驾驶、电力巡检。
- 军用:精确制导、部队协同。
以下以北斗导航系统为例,为大家介绍其基本构成和原理。
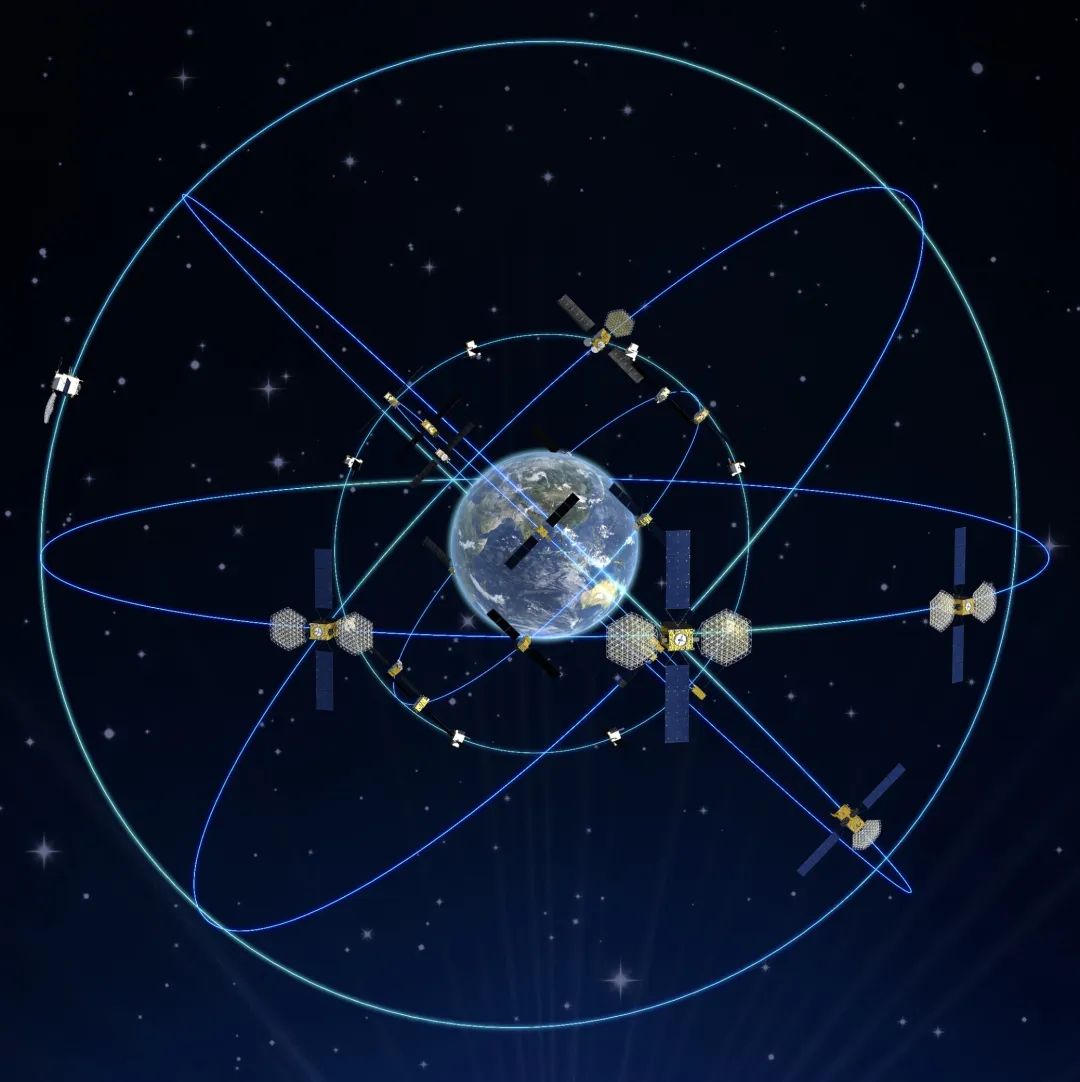
构成
北斗系统由三部分构成:
- 空间段:由各种不同功能的卫星组成。
- 地面段:包括地面各种监测站,负责卫星监控、轨道修正和时间同步。
- 用户段:接收机模块(集成在手机、车载终端上),通过解算卫星信号实现定位。
北斗卫星广播以下信息
- 卫星的精确位置(卫星在空间的X,Y,Z轴的坐标位置)。
- 信号的发射时间(基于卫星原子钟,精度高于纳秒级别)。
- 系统时间与健康状态(用于误差修正)。
接收机模块测量和卫星的距离
当接收机模块收到卫星广播的信号后,通过载波解调技术提取出卫星的位置信息和信号发射时间等关键信息。
而接收机模块同样具有自己的本地晶振,用来获取接收卫星信号的时间。接收机通过测量卫星信号传播时间,即接收到卫星信号的时间减去信号发射时间,然后乘以光速来计算伪距(含误差的距离)。

如果要得到位置信息,接收机模块至少需要4颗卫星信号(三维定位需3颗+1颗校准时钟误差)。
定位方程
接收机通过测量信号传播时间,计算与卫星的伪距(含误差的距离),再结合多颗卫星数据解算自身位置。
接收机位置和时钟偏差通过以下方程解算:
:为计算出的第x颗卫星和接收机模块的距离。
:为卫星广播信号中的第n颗卫星的精确位置。
:为光速,即米每秒
:时钟偏差
可以通过最小二乘法得到的数值,即当前接收机的位置。
精确定位的挑战
- 卫星的轨道误差、时钟偏差。
- 信号传播时的电离层/对流层延迟、多径效应。
- 接收机的硬件噪声、时钟误差。若钟差1,伪距误差300米;若钟差1, 伪距误差0.3米。
- 多普勒频移:卫星高速运动导致载波频率偏移,需实时补偿。